Quando la pelle guida il movimento: lo studio italiano per il futuro della robotica industriale
ricerca e innovazione
Quando la pelle guida il movimento: lo studio italiano per il futuro della robotica industriale
Sviluppato da Università di Pisa, IIT e Roma Tor Vergata e pubblicato sul Journal of the Royal Society Interface, il dispositivo TWIST dimostra che il sistema nervoso integra i segnali tattili per stimare la postura. La scoperta apre la strada ad algoritmi avanzati per la teleoperazione industriale e il controllo di robot umanoidi.
Un anello hi-tech capace di ingannare il sistema nervoso per ridefinire i confini della manipolazione robotica e delle tecnologie assistive: è questo il frutto di uno studio congiunto condotto dall’Università di Pisa, dall’Istituto Italiano di Tecnologia e dall’Università di Roma Tor Vergata.
Lo studio ha dimostrato come lo stiramento della pelle guidi la percezione del movimento del corpo nello spazio, consentendo di alterare la consapevolezza posturale attraverso stimoli tattili.
La ricerca, pubblicata sul Journal of the Royal Society Interface, ha validato l’efficacia del dispositivo indossabile TWIST: amplificandone la deformazione cutanea, l’interfaccia induce il cervello a sovrastimare la flessione del dito.
La scoperta apre la strada a nuove soluzioni nell’interazione uomo-macchina, con applicazioni dirette nei feedback sensoriali per le protesi, nella teleoperazione industriale avanzata e nel controllo motorio dei robot umanoidi.
Il dispositivo TWIST e il principio dell’illusione percettiva
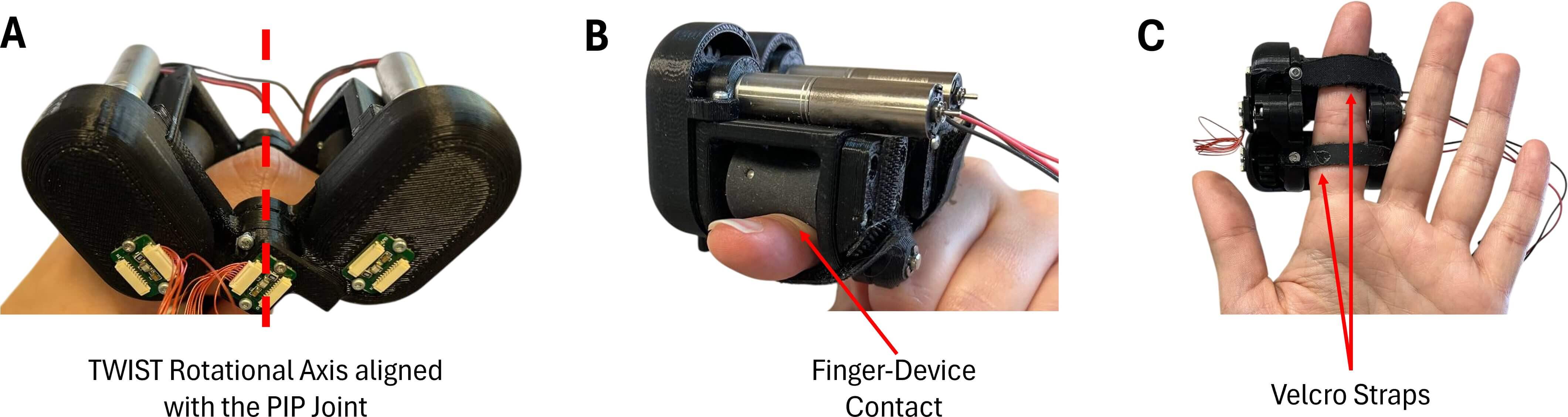
La base tecnologica della ricerca risiede in TWIST (Tactile Wearable Interface for Skin sTretch), un’interfaccia indossabile e non invasiva sviluppata dal Centro Piaggio e dal Dipartimento di Ingegneria dell’Informazione dell’Università di Pisa.
Il dispositivo è stato progettato per agire sull’articolazione interfalangea prossimale, ovvero l’articolazione centrale del dito indice, amplificando meccanicamente il naturale stiramento della cute che avviene durante il movimento volontario.
Nelle sessioni sperimentali, i partecipanti dovevano replicare con una mano la posizione assunta dall’altro indice. I test condotti a mano nuda o con il dispositivo spento non hanno registrato scostamenti significativi, confermando la neutralità fisica dello strumento.
Al contrario, una volta attivato TWIST, l’incremento artificiale della deformazione cutanea ha spinto i soggetti a percepire il dito come maggiormente flesso rispetto alla realtà, portandoli a compensare l’errore mantenendo l’arto più esteso.
I risultati confermano che il sistema nervoso centrale integra attivamente i segnali provenienti dai meccanocettori cutanei per stimare la postura e la cinematica degli arti.
Applicazioni industriali: teleoperazione, robotica e interfacce uomo-macchina
La comprensione di questi meccanismi di feedback aptico e propriocettivo esce dall’ambito puramente neuroscientifico per entrare in quello dello sviluppo di sistemi industriali avanzati.
La ricerca, supportata dai fondi del progetto PERCEIVING, punta a estendere l’architettura hardware a sistemi multi-articolazione, capaci di mappare i pattern distribuiti dell’intera mano.
Nell’ambito dell’automazione e della fabbrica intelligente, la capacità di trasmettere informazioni posturali accurate attraverso lo stiramento della pelle offre prospettive immediate in tre segmenti tecnologici:
- Robotica umanoide e protesica. Lo studio dei principi biologici della percezione fornisce i modelli matematici necessari per lo sviluppo di algoritmi di controllo motorio per robot di nuova generazione, rendendoli capaci di muoversi nello spazio ed eseguire compiti di precisione con una gestione autonoma del proprio corpo nel mondo.
- Teleoperazione e manutenzione remota. Nei contesti in cui l’operatore guida un braccio robotico a distanza, ricevere un feedback intuitivo sulla posizione dell’attuatore senza basarsi solo sulla vista aumenta la precisione e riduce i tempi di ciclo.
- Realtà virtuale e digital twin. L’integrazione di questi vettori di forza nelle periferiche indossabili permette una manipolazione degli oggetti virtuali più naturale, replicando la resistenza e la cinematica reale.
“Comprendere i principi fisici e neurali che governano la propriocezione non è soltanto un obiettivo scientifico: è una condizione abilitante per la prossima generazione di macchine capaci di percepire e controllare il proprio corpo nel mondo”, spiega il professor Antonio Bicchi, dell’Università di Pisa.
“Dai dispositivi indossabili ai robot umanoidi, ogni sistema che aspiri a muoversi e interagire con l’efficienza del corpo biologico ha bisogno di soluzioni ingegneristiche radicate in questa conoscenza”, aggiunge.
L'articolo Quando la pelle guida il movimento: lo studio italiano per il futuro della robotica industriale proviene da Innovation Post.
Qual è la tua reazione?
 Mi piace
0
Mi piace
0
 Antipatico
0
Antipatico
0
 Lo amo
0
Lo amo
0
 Comico
0
Comico
0
 Wow
0
Wow
0
 Triste
0
Triste
0
 Furioso
0
Furioso
0
Redazione Eventi e News



















Commenti (0)