




































































































































































































Muscoli artificiali per la soft robotics: dall’Arizona State University attuatori che sollevano 100 volte il proprio peso
Robotica soft
Muscoli artificiali per la soft robotics: dall’Arizona State University attuatori che sollevano 100 volte il proprio peso
Un team di ricercatori dell’Arizona State University ha sviluppato attuatori polimerici bioispirati – chiamati HARP – che imitano la contrazione muscolare naturale. Leggeri, flessibili e silenziosi, possono sollevare fino a 100 volte il proprio peso e hanno già permesso di realizzare un robot quadrupede completamente autonomo. Le applicazioni spaziano dall’industria all’agricoltura, dalla sanità all’esplorazione spaziale.
I robot del futuro saranno più leggeri, più piccoli e svincolati da fonti di alimentazione esterne. È la promessa che arriva dal Robotic Actuators and Dynamics Lab dell’Arizona State University, dove un gruppo di ricercatori ha messo a punto una nuova generazione di muscoli artificiali in grado di superare i limiti dei tradizionali attuatori a motore elettrico.
I risultati sono stati pubblicati il 27 marzo sulla rivista PNAS (Proceedings of the National Academy of Sciences) in un paper intitolato “Versatile Artificial Muscles by Decoupling Anisotropy”, firmato dal dottorando Eric Weissman e dal professor Jiefeng Sun, direttore del laboratorio.
Come funzionano gli attuatori HARP
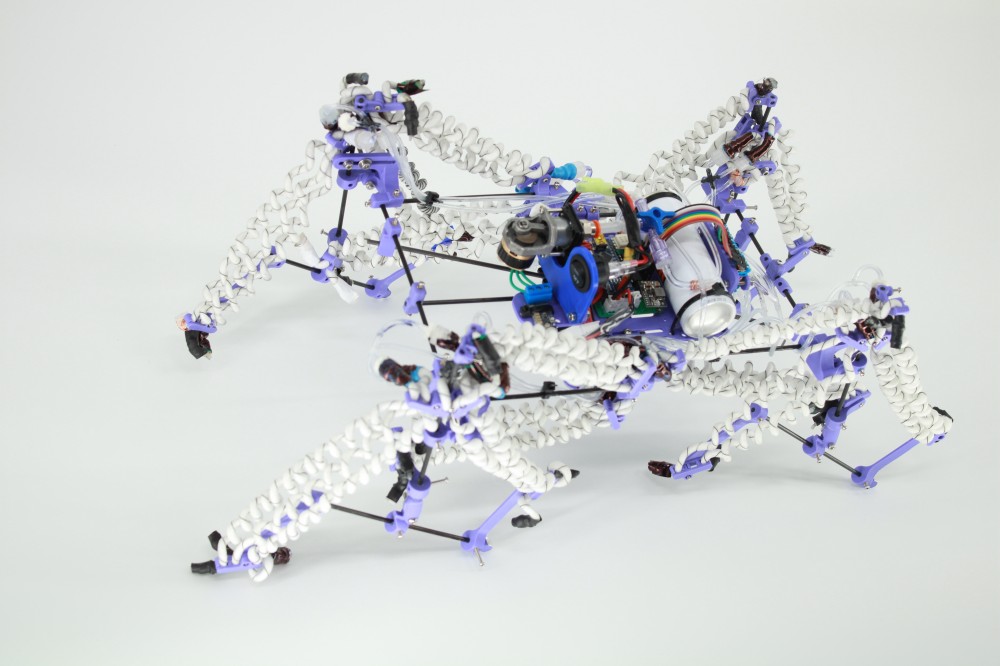
Gli attuatori sviluppati all’ASU si chiamano HARP, acronimo di Helical Anisotropically Reinforced Polymer. Si tratta di strutture polimeriche a spirale che imitano il meccanismo di contrazione ed espansione dei muscoli biologici. “Questi muscoli assomigliano a piccoli tubi avvolti a spirale, simili ai maccheroni elicoidali cavi a forma di cavatappi”, spiega Weissman. “Quando li gonfiamo applicando una piccola quantità d’aria, si espandono e si contraggono”.
Il risultato è un attuatore flessibile, molto leggero e silenzioso, capace di sollevare fino a 100 volte il proprio peso – un rapporto forza-peso nettamente superiore a quello degli equivalenti azionati elettricamente. A differenza dei robot quadrupedi oggi in commercio, tipicamente basati su motori e quindi pesanti e poco flessibili, gli attuatori HARP consentono di costruire macchine più agili e adattabili.
“Abbiamo sviluppato un muscolo artificiale che imita quelli reali”, sintetizza Weissman. “Rispetto ai muscoli bioinspirati già esistenti, i nostri sono più versatili, più leggeri e più potenti”.
La riduzione della pressione necessaria al funzionamento ha permesso al team di realizzare un robot quadrupede in grado di camminare in modo completamente autonomo, trasportando tutto il necessario – compresa l’alimentazione – a bordo.
Dal braccio bionico al supporto dorsale: le applicazioni industriali
Il lavoro del laboratorio di Sun non si limita ai muscoli HARP. Il gruppo di ricerca sta sviluppando un framework generale per adattare la tecnologia a molteplici applicazioni a basso costo.
Tra i progetti più avanzati c’è il “braccio bionico a proboscide di elefante”, sviluppato dal dottorando Jiahe Wang. Si tratta di un braccio robotico soft ispirato alla flessibilità e alla destrezza della proboscide di un elefante, pensato per operazioni di ispezione e manipolazione in ambienti industriali difficilmente accessibili. “In luoghi come gli impianti chimici o le linee di produzione affollate, le apparecchiature sono spesso difficili da raggiungere e sensibili ai contatti accidentali”, spiega Wang. “Anche semplici ispezioni possono richiedere l’arresto delle operazioni, con costi e tempi significativi”.
Il braccio è leggero e intrinsecamente sicuro per gli operatori nelle vicinanze, un vantaggio importante negli scenari che richiedono un’interazione ravvicinata uomo-robot. In agricoltura una versione più sottile potrebbe muoversi tra le piante per operazioni di impollinazione. “Colture come fragole e pomodori hanno chiome fogliari dense, difficili da attraversare per gli impollinatori”, osserva Sun. “Un braccio robotico soft può penetrare nella vegetazione e svolgere le funzioni di impollinazione, aggirando qualsiasi ostacolo”.
Versioni più robuste potrebbero invece trovare impiego nello spazio, assistendo gli astronauti nella manutenzione o nel passaggio di utensili, con il vantaggio di essere sicuri anche in caso di collisioni accidentali.
Un terzo filone riguarda un dispositivo di supporto dorsale (BSD) sviluppato dal dottorando Rohan Khatavkar. Il dispositivo è pensato per ridurre il sovraccarico fisico durante attività industriali come il sollevamento di carichi pesanti. “I dispositivi attivi tradizionali sono azionati da motori e possono essere regolati in base alle esigenze del compito – spiega Khatavkar – ma sono ingombranti e pesanti. I dispositivi passivi sono leggeri e compatti, ma non possono essere adattati”. Il BSD del team ASU combina elementi attivi e passivi in parallelo – un attuatore elastico e un muscolo artificiale pneumatico – ottenendo un sistema compatto e leggero ma al tempo stesso regolabile nella forza assistiva.
Le prospettive: dall’industria allo spazio
Il team ha depositato un brevetto provvisorio tramite Skysong Innovations, la struttura di trasferimento tecnologico dell’ASU, e ha ottenuto un Nvidia Academic Grant che fornirà hardware a supporto della ricerca.
“In definitiva possiamo utilizzare questi dispositivi muscolari più morbidi, flessibili e cedevoli in un’ampia gamma di robot, perché sono più piccoli, più leggeri e non presentano i rischi di schiacciamento tipici dei robot rigidi di oggi”, afferma Sun. “Utilizzando materiali di grado spaziale, possiamo garantire mobilità, agilità e facilità di movimento sia per i dispositivi destinati agli astronauti sia per i robot che li accompagneranno nello spazio”.

Franco Canna
L'articolo Muscoli artificiali per la soft robotics: dall’Arizona State University attuatori che sollevano 100 volte il proprio peso proviene da Innovation Post.
Qual è la tua reazione?
 Mi piace
0
Mi piace
0
 Antipatico
0
Antipatico
0
 Lo amo
0
Lo amo
0
 Comico
0
Comico
0
 Furioso
0
Furioso
0
 Triste
0
Triste
0
 Wow
0
Wow
0