

























































































































































-1754133631392.png--valerio_minato_svela_il_volto_in_movimento_del_monviso_sotto_le_stelle.png?1754133631616#)


































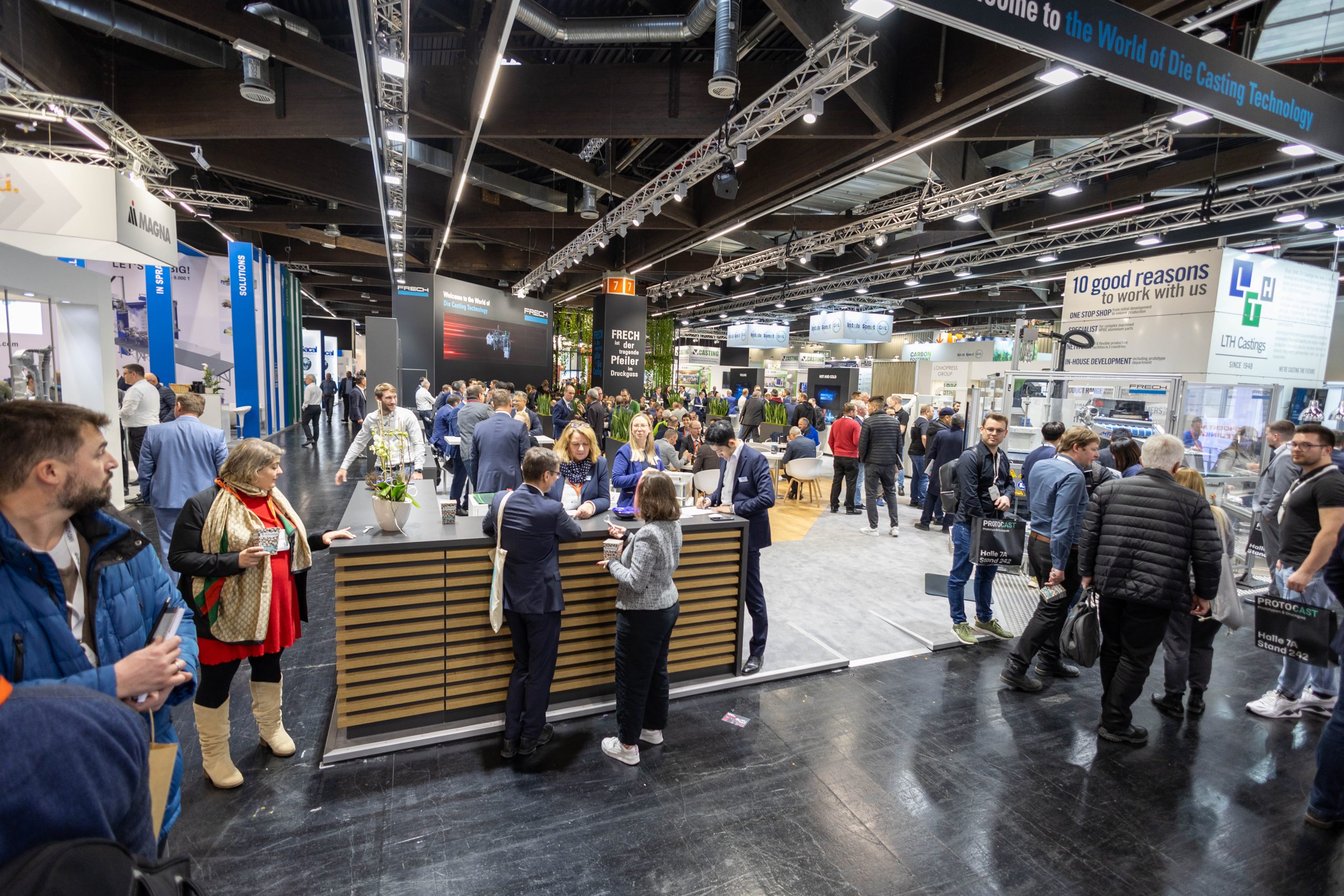
ROS 2: il framework che porta la robotica dallo sviluppo accademico al mondo industriale
automazione
ROS 2: il framework che porta la robotica dallo sviluppo accademico al mondo industriale
Nato in ambito accademico, il Robot Operating System 2 (ROS 2) è oggi uno standard maturo e affidabile anche per l’uso industriale. Ecco quali sono le sue caratteristiche e potenziali applicazioni.
Con l’adozione di piattaforme aperte, la robotica sta abbandonando le architetture verticali e chiuse per abbracciare sistemi intrinsecamente flessibili e interoperabili.
Il Robot Operating System (ROS), in particolare nella sua versione moderna ROS 2, è protagonista e abilitatore di questa transizione, essendosi affermato come standard de facto oltre l’ambito accademico, nel quale è nato, per diventare protagonista anche nei processi produttivi.
L’evoluzione e l’impatto di ROS 2 sono stati analizzati in dettaglio durante due sessioni della seconda edizione della Ctrl Automation Week di Bosch Rexroth, con contributi tecnici di Mirko Ferrati, Robotics Engineering Manager di Canonical, e di Claudio Chieppa, Robotic Business Unit Manager di Reply.
Le fondamenta aperte: Canonical e l’evoluzione di ROS
Canonical, l’azienda che sviluppa Ubuntu – il sistema operativo Linux basato su kernel più diffuso al mondo -, ha svolto un ruolo cruciale nello sviluppo di questa architettura.
Nata con l’obiettivo di fornire Ubuntu come prodotto gratuito e open source, Canonical ha visto la sua piattaforma adottata come base di sviluppo principale per ROS sin dalle sue origini, oltre 15 anni fa.
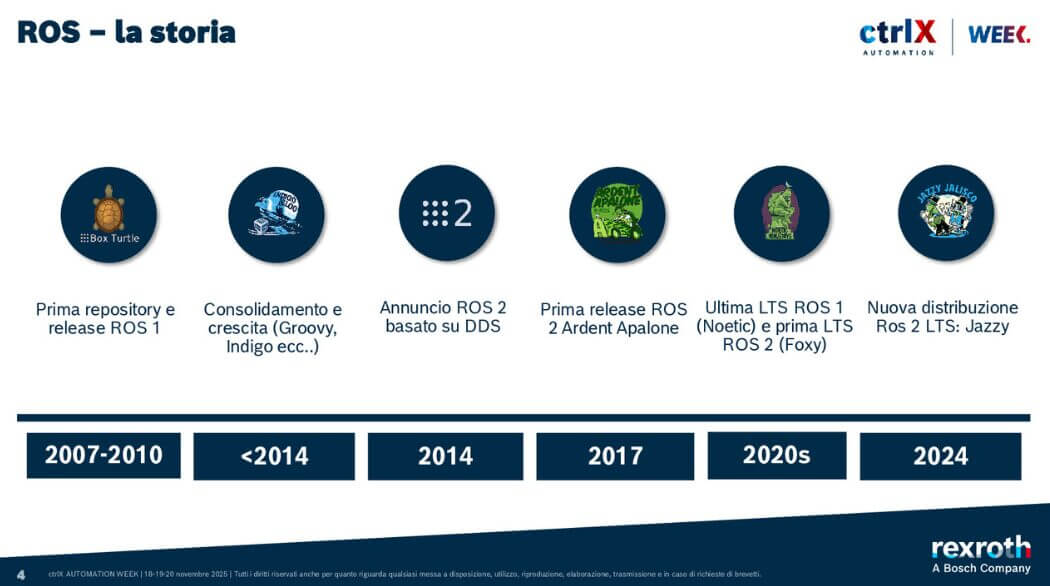
“La prima release fu sviluppata nel 2007, ma ci vollero tre anni prima che gli sviluppatori decidessero di aprire al pubblico ROS 1 nel 2010”, spiega Ferrati.
Il punto di rottura arrivò nel 2014, quando i casi d’uso in aumento e i primi problemi di design della versione iniziale resero necessaria una riprogettazione completa.
“I maintainer del progetto Open Source ROS hanno deciso di fare un nuovo design, chiamarlo ROS 2,” aggiunge Ferrati.
Elemento centrale di ROS 2 è l’adozione dello standard di comunicazione DDS (Data Distribution Service), che agisce come middleware e implementa il classico paradigma publisher-subscriber, fornendo un sistema di comunicazione standardizzato tra tutti i componenti software del robot (chiamati nodi).
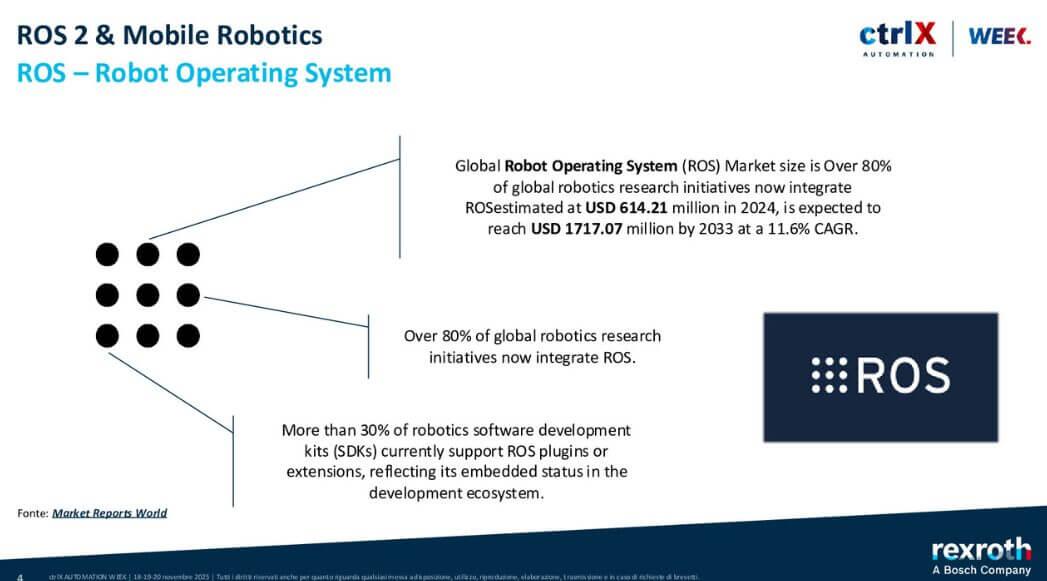
L’importanza del framework è tale che oggi l’80% delle iniziative di ricerca globale nel campo della robotica utilizza e integra ROS, con la più recente distribuzione LTS (Long Term Support) di ROS 2 del 2024 a rappresentarne il futuro.
Open Innovation: il valore della modularità e il modello pro
Il valore di business generato da ROS 2 risiede intrinsecamente nella sua modularità, che consente alle aziende di considerare i suoi componenti come elementi architetturali riutilizzabili.
L’adozione del framework, iniziata nelle università, si è estesa a un vasto ecosistema di attori che producono sia componenti hardware capaci di comunicare nativamente con ROS 2, sia software avanzato, come algoritmi complessi di navigazione.
Questa rete di sviluppo condiviso crea un vantaggio competitivo irrinunciabile nel mercato.
“Un’azienda non può pensare di farsi in casa per intero tutto questo sistema. Magari può sviluppare un driver o un sensore, ma quando si arriva a costruire una soluzione complessa, conviene strategicamente riusare ciò che è già disponibile in open source, grazie al supporto di numerose aziende e alla validazione di una vasta base di utenti”, aggiunge Ferrati.
Questo modello di Open Innovation si fonda sulla coesistenza virtuosa tra la versione comunitaria e l’offerta professionale (modello Pro), garantendo il sostegno, le prestazioni e la conformità necessarie per l’uso industriale.
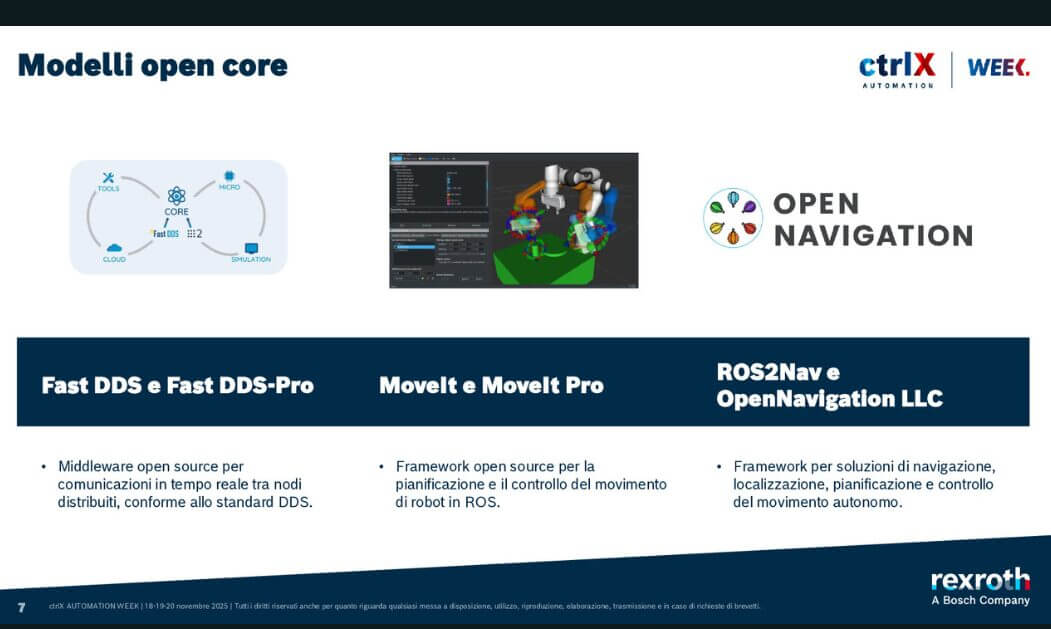
Esempi concreti di questo approccio sostenibile sono Fast DDS Pro (per il middleware di comunicazione DDS), MoveIt Pro (per la pianificazione di movimenti complessi di bracci robotici) e ROS 2 Nav di Open Navigation LLC, il cui modello di business si basa sul finanziamento per lo sviluppo di nuove feature nella versione aperta, creando un circolo economico che alimenta l’innovazione collettiva.
Ubuntu core: Sicurezza e supporto per l’industria
La solidità di una piattaforma come ROS 2, che punta alla stabilità decennale e all’adozione in contesti critici, deve poggiare su un sistema operativo (OS) altrettanto resiliente e sicuro.
Sebbene Ubuntu Desktop sia la piattaforma di sviluppo storica per ROS, Canonical ha sviluppato Ubuntu Core per rispondere ai rigorosi requisiti degli ambienti di produzione industriale.
“Per l’utilizzo in robot e dispositivi IoT che devono operare senza interruzioni per molti anni, l’OS è stato depurato da componenti superflui, mantenendo il core e la piena compatibilità con le applicazioni ROS 2″, spiega Ferrati.
L’affidabilità e la gestione del ciclo di vita dei dispositivi industriali trovano una risposta diretta nelle specifiche architetturali di Ubuntu Core. La sua capacità di garantire la continuità operativa si concretizza in due caratteristiche:
- la possibilità di eseguire aggiornamenti Over-The-Air (OTA) da remoto
- il supporto nativo al rollback automatico in caso di malfunzionamento, un meccanismo di ripristino essenziale che mitiga i fermi macchina.
Sul fronte della sicurezza, l’OS indirizza le esigenze di cyber security attraverso Secure Boot, la crittografia dell’intero sistema e l’obbligo di aggiornamenti firmati digitalmente dal produttore, blindando l’integrità del software di bordo.
Questa base tecnologica, con il suo supporto a lungo termine e a standard aperti, è stata scelta anche da Bosch Rexroth per il suo ctrlX OS, abilitando l’integrazione di applicazioni proprietarie e di terze parti.
In questo modo si mitiga il rischio di long-term maintenance che affligge i sistemi chiusi, dove la perdita di supporto software può rendere i macchinari obsoleti e vulnerabili.
Dalla ricerca all’industria
Sebbene ROS 2 sia nato come progetto accademico, oggi è uno strumento entrato a pieno titolo nelle fabbriche e nei processi industriali.
Il valore economico generato dai sistemi operativi per la robotica sottolinea l’importanza e la diffusione di piattaforme come ROS 2.
Una valutazione del 2024 attesta che l’ambito di utilizzo di questi sistemi si aggira intorno ai 614 milioni di dollari, con una stima di crescita che proietta un ammontare di 1,7 miliardi di dollari entro il 2033, grazie a un tasso di crescita annuale composto (CAGR) dell’11,6%.
La centralità del framework è evidente non solo nella ricerca (80% delle iniziative globali ), ma anche nel mercato degli strumenti di sviluppo: oggi il 30% dei kit di sviluppo software (SDK) per la robotica integrano o utilizzano estensioni o plugin di ROS. ROS 2 è in grado di accelerare la creazione di architetture intrinsecamente modulari, scalabili e affidabili.
ROS 2, infatti, è stato completamente riprogettato per rispondere alle moderne esigenze della robotica mobile collaborativa e per supportare la transizione della robotica umanoide dall’ambito di ricerca al pieno impiego industriale.
Nello scenario produttivo, ROS 2 offre la possibilità di integrare sistemi gestionali complessi come i WMS (Warehouse Management Systems), MES (Manufacturing Execution Systems) e FMS (Flexible Manufacturing Systems).
Funge da middleware di disaccoppiamento tra il mondo degli ordini e delle informazioni di processo (gestite dai gestionali) e il mondo dell’orchestrazione delle flotte robotiche, supportando scenari in cui robot e operatori umani collaborano con efficienza e sicurezza.
“Questo salto di qualità è stato reso possibile da un insieme di fattori tecnici e da un salto culturale“, spiega Claudio Chieppa, Robotic Business Unit Manager di Reply.
“La sfida principale che l’industria ha dovuto superare è culturale perché le aziende industriali sono tradizionalmente abituate ad avere delle soluzioni verticali chiuse, dedicate a un unico scopo. Di conseguenza, il passaggio a una piattaforma aperta è un cambiamento culturale significativo che richiede di mostrare al mercato tutti i benefici che tale piattaforma offre”, aggiunge.
Un cambiamento di cui l’industria si è fatta pioniera, grazie al contributo di alcuni grandi realtà che hanno quindi portato il framework verso i requisiti necessari al suo utilizzo.
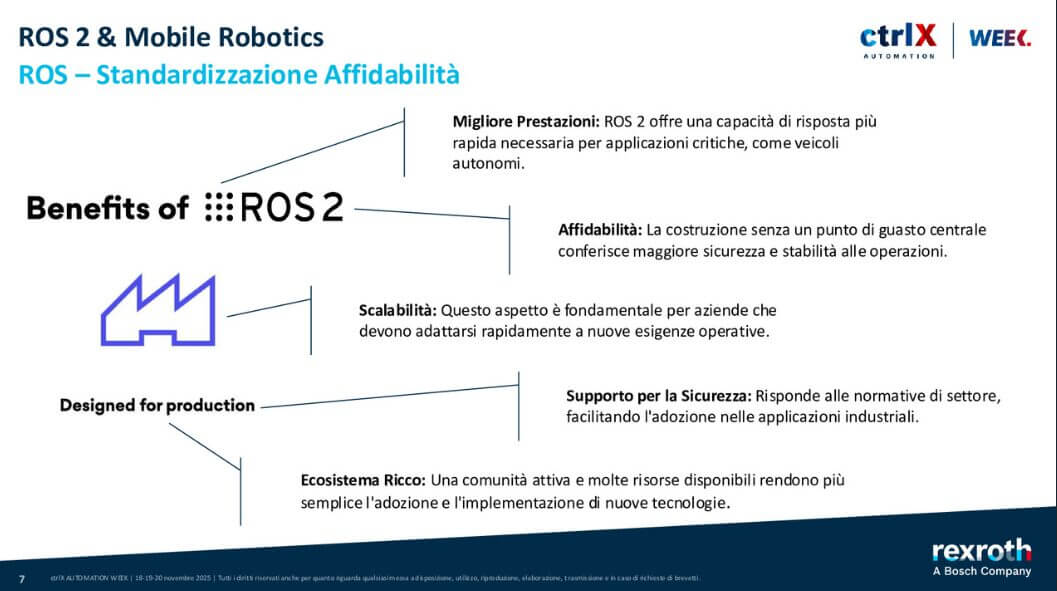
Dal punto di vista tecnico, le quattro caratteristiche chiave che hanno reso ROS 2 adatto al contesto di fabbrica sono:
- Adozione dello standard DDS. L’introduzione del Data Distribution Service (DDS) come middleware di comunicazione assicura l’affidabilità e la scalabilità necessarie per le comunicazioni tra i nodi, un requisito fondamentale per le flotte robotiche complesse e distribuite.
- Focus sulla sicurezza. La sicurezza non è più un add-on ma è integrata nel design, attraverso meccanismi di autenticazione e autorizzazione tra i nodi di comunicazione, elementi indispensabili per garantire l’integrità del sistema in ambienti produttivi critici.
- Supporto nativo per il real time. L’integrazione di ROS 2 con kernel compatibili, come i kernel in tempo reale (RTOS), permette di soddisfare i requisiti di latenza e determinismo essenziali per il controllo di precisione e la gestione delle dinamiche rapide della robotica.
- Uniformità dei sistemi di logging e testing. La presenza di strumenti e metodologie standardizzate per il logging e il testing semplifica notevolmente la gestione e la manutenzione del software nel lungo periodo, fornendo la tracciabilità e l’affidabilità tipiche degli standard industriali.
Gestione e integrazione: il contributo di ROS 2 alla complessità
L’integrazione di ROS 2 non si limita alla comunicazione tra i componenti robotici (on-board), ma si estende all’architettura software dell’intera fabbrica.
“Il framework è fondamentale nella semplificazione e gestione di coordinamenti complessi. ROS 2 agisce come un layer di astrazione e standardizzazione, fornendo ciò che serve per un’integrazione software efficace: una metodologia comune, strumenti validati e un’architettura disaccoppiata”, aggiunge Chieppa.
Caratteristiche che permettono al framework di orchestrare in modo più efficiente le flotte robotiche complesse e di gestire i sistemi di automazione su larga scala.
Un aspetto decisivo è la prontezza di ROS 2 per il mondo dell’automazione moderna, che opera in un paradigma ibrido. Il framework è nativamente predisposto per l’esecuzione sia on-board (sui robot o sui PLC) sia in cloud, permettendo alle aziende di bilanciare le esigenze di controllo in tempo reale con la gestione centralizzata dei dati e degli algoritmi di intelligenza artificiale.
Cyber security e mitigazione del rischio nell’architettura ROS 2
In questo scenario di integrazione ibrida e distribuita, la sicurezza e la cyber security diventano fattori di rischio primari, che richiedono un approccio proattivo nel design dell’architettura.
L’approccio di Reply è quello di sfruttare le feature di sicurezza già integrate in ROS 2, come l’autenticazione tra nodi, combinandole con un’architettura che minimizza le vulnerabilità.
“È fondamentale sottolineare che il contributo di ROS 2 è parte di un approccio più ampio e culturale di cyber security, che deve essere applicato dalle aziende come strategia multilivello e che include anche la segregazione delle reti, le reti dedicate e i firewall hardware industriali”, aggiunge Chieppa.
Reply adotta una postura proattiva: in qualità di integratore che utilizza robot di terzi, l’azienda esegue attacchi sui robot per verificare dove vanno i dati prima di metterli in campo. Per costruire questi attacchi vengono anche utilizzate procedure basate sull’Intelligenza Artificiale
La scelta di ROS 2 e della sua architettura distribuita è in sé una misura di mitigazione: separando le funzionalità in nodi indipendenti, il sistema ottiene una segmentazione del rischio.
In caso di attacco a un singolo componente, l’architettura garantisce una maggiore resilienza complessiva del sistema rispetto a un approccio monolitico.
L’orizzonte ibrido: verso una robotica collaborativa e resiliente
Grazie alle sue caratteristiche e le funzionalità ROS 2 si presenta come uno standard in grado di traghettare l’industria verso un futuro sempre più ibrido e collaborativo dove, come sottolinea Chieppa, “l’obiettivo non è sostituire i sistemi di automazione esistenti, ma creare una sinergia tra la stabilità dei controllori tradizionali (PLC) e la flessibilità del software moderno“.
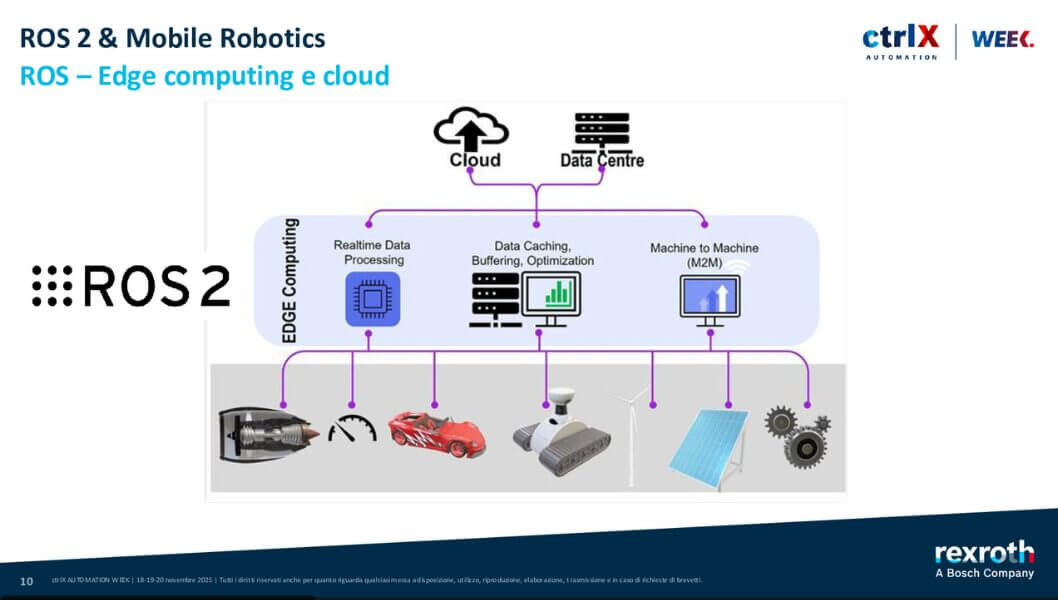
“Questo futuro si concretizza nel modello architetturale definito Cloud Edge Continuum, dove ROS 2, in quanto piattaforma a micro servizi, può essere distribuito su tutti i livelli, dal microcontrollore a bordo robot fino al cloud”, conclude.
L'articolo ROS 2: il framework che porta la robotica dallo sviluppo accademico al mondo industriale proviene da Innovation Post.
Qual è la tua reazione?
 Mi piace
0
Mi piace
0
 Antipatico
0
Antipatico
0
 Lo amo
0
Lo amo
0
 Comico
0
Comico
0
 Furioso
0
Furioso
0
 Triste
0
Triste
0
 Wow
0
Wow
0